AI(Artificial Intelligence,人工智能)开源项目越来越多,但真正适合拿来学习或落地的项目,通常不只是“接了一个大模型接口”,而是把模型能力放进了明确的工程场景里。
这 4 个项目覆盖了 AI 落地的 4 个方向:
| 项目 | 解决的问题 | 核心能力 | 更适合谁看 |
|---|---|---|---|
| Edit Banana | 图片、PDF 里的图表不可编辑 | 将图表重建为 Draw.io XML 或 PPTX | 经常整理论文图、架构图、流程图的人 |
| Xiaomi-Robotics-0 | 机器人需要同时理解环境、指令并执行动作 | 视觉-语言-动作 VLA 模型 | 机器人、具身智能研究者 |
| MyCodeAgent | 想理解 Claude Code 类代码智能体怎么实现 | 从 0 构建代码 Agent 的工程框架 | 想研究 Agent 架构的开发者 |
| Accomplish | 桌面文件、文档、浏览器任务重复且分散 | 本地 AI 桌面助手与自动化 Skill | 想把 AI 接入本地工作流的人 |
Edit Banana:把截图和 PDF 图表变成可编辑文件
很多技术资料里的图表都是图片或 PDF(Portable Document Format,可移植文档格式)里的静态内容。问题在于,图里的节点、箭头、文字看起来很清楚,但无法单独选中,也不能直接拖动修改。
普通 OCR(Optical Character Recognition,光学字符识别)只能把文字识别出来,解决不了“图形结构不可编辑”的问题。Edit Banana 的目标更进一步:它尝试恢复图表里的形状、文本、连接线和逻辑关系,再导出为 Draw.io XML(Extensible Markup Language,可扩展标记语言)或 PPTX(PowerPoint 演示文稿格式)。
它处理的不是“截图上覆盖一层文字”,而是把图表重新拆成可编辑对象。
flowchart LR
A[图片或 PDF 图表] --> B[版面与组件识别]
B --> C[文本识别]
B --> D[形状识别]
B --> E[连线与层级关系识别]
C --> F[结构化图表模型]
D --> F
E --> F
F --> G[Draw.io XML]
F --> H[PPTX]
G --> I[继续编辑]
H --> I
它和 OCR 的区别
| 能力 | 普通 OCR | Edit Banana |
|---|---|---|
| 提取文字 | 支持 | 支持 |
| 识别矩形、圆形、箭头等组件 | 通常不处理 | 支持 |
| 恢复组件之间的连接关系 | 通常不处理 | 支持 |
| 导出可编辑图表 | 不支持或很弱 | 支持 Draw.io XML、PPTX |
| 适合场景 | 扫描文档转文字 | 图表、流程图、统计图重建 |
这组示例展示了它要解决的问题:输入是一张不可编辑的图,输出则变成了可单独选中、移动和修改的图形对象。
输入图里所有内容都被压在一张图片中,想改某个文本或调整某条连接线,只能重新画。
重建后的版本会把文字、形状和连接关系拆出来,适合继续在 Draw.io 或 PowerPoint 里修改。
适合的使用场景
Edit Banana 适合处理这类任务:
- 论文、报告里的流程图需要二次编辑;
- 旧 PPT 只剩截图,需要恢复为可修改版本;
- 架构图来自 PDF,想改文字、换颜色、调整布局;
- 团队内部资料只有图片,没有源文件。
它不适合把任意复杂图片都转换成设计稿。比如真实照片、复杂海报、带大量渐变和装饰元素的图片,本身没有稳定的“图表结构”,重建效果会受限制。
上手方式
开源地址:
https://github.com/bit-datalab/edit-banana
可以从一个简单流程开始验证效果:
- 找一张清晰的流程图或架构图截图;
- 上传到 Edit Banana 的 Web 界面;
- 选择导出 Draw.io XML 或 PPTX;
- 打开导出文件,检查文字、形状、箭头是否能独立选中;
- 对识别错误的部分手动修正。
更推荐用线条清楚、文字水平、背景简单的图做第一次测试。图片分辨率太低、字体太小、连接线交叉太多时,重建难度会明显升高。
Xiaomi-Robotics-0:面向机器人的视觉-语言-动作模型
Xiaomi-Robotics-0 是小米机器人团队 Xiaomi Robotics 开源的具身智能模型,参数规模为 47 亿。它属于 VLA(Vision-Language-Action,视觉-语言-动作)模型,核心目标是让机器人把“看到的环境”“听懂的指令”和“要执行的动作”连接起来。
普通大语言模型主要处理文本,最多再扩展到图像理解;机器人模型还要处理动作输出。机器人不能只回答“应该拿起杯子”,它还要生成能驱动机械臂或机器人本体执行的控制信号。
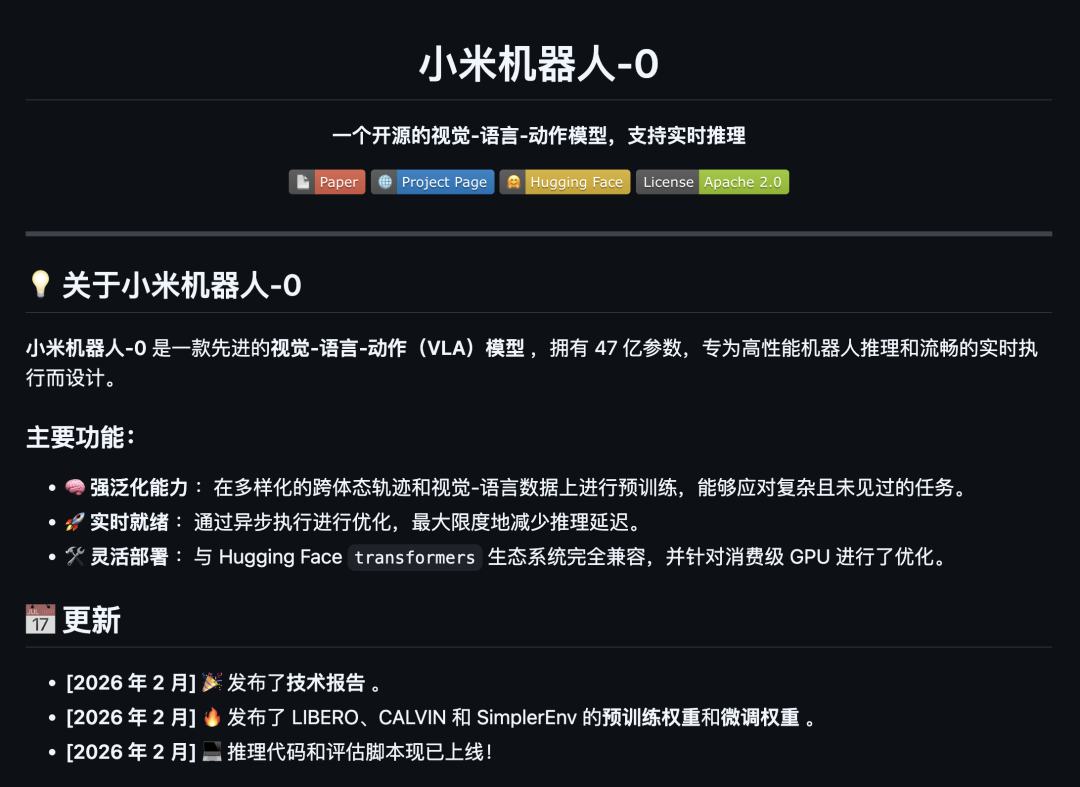
这类模型的关键在于把感知、指令理解和动作生成放在同一条链路里:视觉输入提供环境状态,语言输入提供任务目标,模型输出动作序列,机器人执行后再从环境中获得新的观测。
sequenceDiagram
participant U as 用户
participant R as 机器人传感器
participant M as VLA 模型
participant A as 执行机构
U->>M: 给出语言指令
R->>M: 输入视觉观测
M->>M: 融合环境与任务目标
M->>A: 输出动作控制
A->>R: 改变环境并产生新观测
R->>M: 返回新的视觉状态
VLA 模型解决什么问题
机器人执行任务通常会遇到三个难点:
| 难点 | 说明 |
|---|---|
| 环境复杂 | 真实场景里物体位置、遮挡、光照都会变化 |
| 指令开放 | 用户可能说“把桌上的红色杯子拿过来”,而不是给出固定程序 |
| 执行要实时 | 机器人动作控制不能等太久,否则会错过状态变化 |
Xiaomi-Robotics-0 的定位就是在这些问题之间做平衡:既要具备泛化能力,能理解不同视觉场景和语言指令,又要控制推理延迟,让动作生成足够接近实时执行需求。
适合和不适合的场景
| 场景 | 是否适合 |
|---|---|
| 机器人操作、移动、交互相关研究 | 适合 |
| 研究 VLA 模型结构和具身智能训练方法 | 适合 |
| 搭建机器人原型系统 | 可以作为参考,但需要结合硬件与安全策略 |
| 普通聊天机器人 | 不适合,能力重点不在文本对话 |
| 没有仿真环境或机器人硬件的直接落地 | 难度较高 |
机器人系统里,模型只是其中一环。真正接入硬件时,还需要处理传感器同步、动作安全边界、急停机制、仿真验证和控制频率等问题。尤其是物理机器人,不能把模型输出直接无保护地交给执行机构。
开源地址:
https://github.com/XiaomiRobotics/Xiaomi-Robotics-0
MyCodeAgent:从工程角度拆解代码智能体
MyCodeAgent 是一个从 0 开始开发 Claude Code 类代码智能体的开源项目。它的价值不只是“能不能让模型写代码”,而是展示了代码 Agent 在工程上为什么需要约束、协议、工具和上下文管理。
代码智能体通常会经历这样的循环:
- 用户提出任务;
- 模型理解任务并规划操作;
- Agent 调用工具读取文件、搜索代码、执行命令或修改文件;
- 工具返回结果;
- 模型根据结果决定下一步;
- 循环直到任务完成。
flowchart TD
A[用户任务] --> B[任务规划]
B --> C[大语言模型]
C --> D[工具路由]
D --> E[读取文件]
D --> F[搜索代码]
D --> G[执行命令]
D --> H[修改文件]
E --> I[观察结果]
F --> I
G --> I
H --> I
I --> J[上下文管理]
J --> C
C --> K[生成最终结果]
代码 Agent 的难点不在“会不会调用模型”
LLM(Large Language Model,大语言模型)本身具有不确定性。让它直接操作代码仓库,会出现很多工程问题:
| 问题 | 表现 | 工程处理方式 |
|---|---|---|
| 工具失控 | 模型频繁调用不必要工具,甚至执行危险命令 | 工具原子化、权限限制、操作确认 |
| 协议脆弱 | 模型输出格式不稳定,工具解析失败 | 使用结构化协议,例如 JSON Schema |
| 上下文膨胀 | 文件、日志、历史对话越来越长 | 做上下文裁剪、摘要和检索 |
| 状态不可见 | 不知道 Agent 当前做了什么、为什么这样做 | 增加日志、事件流和状态追踪 |
| 修改不可控 | 一次改太多文件,难以回滚 | 限制变更范围,提供 diff 审查 |
MyCodeAgent 的工程思想可以概括为一句话:不要把模型的自由发挥当作系统可靠性的来源,而要用工具边界、协议格式和上下文治理把模型能力限制在可控范围内。
工具调用为什么要结构化
如果模型随便输出自然语言,比如“我想读一下 main.py”,程序很难稳定解析。更可靠的做法是让模型输出结构化工具调用:
{
"tool": "read_file",
"args": {
"path": "src/main.py"
}
}
工具层只接受白名单里的工具名和参数格式。这样做有几个好处:
- 参数能被程序校验;
- 不存在的工具会被拒绝;
- 危险操作可以加确认;
- 日志里能清楚记录每一步动作;
- 出错时能定位是模型决策问题,还是工具执行问题。
适合的学习方式
开源地址:
https://github.com/YYHDBL/MyCodeAgent
更适合用一个小型测试仓库来跑它,例如只包含几个 Python 或 JavaScript 文件的项目。不要一开始就把大型生产仓库交给 Agent 操作,也不要默认允许它执行删除文件、提交代码、安装依赖这类高风险动作。
一个比较安全的验证流程是:
git clone https://github.com/YYHDBL/MyCodeAgent
然后按仓库 README 配置环境,再准备一个独立测试目录:
sandbox-project/
src/
tests/
README.md
测试任务可以从低风险操作开始:
- 解释某个函数的作用;
- 为一个小函数补测试;
- 查找重复代码;
- 修改一个明确范围内的 bug;
- 生成变更 diff,但先不自动写入主项目。
Accomplish:把 AI 放进本地桌面工作流
Accomplish 是一个开源 AI 桌面助手,它把模型能力接入本地文件、文档和浏览器任务。它关注的不是单次问答,而是把重复性桌面操作变成可复用的自动化流程。
典型任务包括:
- 根据文件内容自动分类、重命名、移动或清理;
- 总结长文档、改写报告、生成草稿;
- 从散乱笔记中提取信息,整理会议准备材料;
- 执行网页调研、填写表单等浏览器流程;
- 将固定工作流保存成 Skill,之后重复调用;
- 与 Notion、Google Drive、Dropbox 等工具配合使用。
它的工作方式可以理解为“AI 理解任务 + 本地工具执行动作”。
flowchart LR
A[用户目标] --> B[选择或创建 Skill]
B --> C[AI 理解任务]
C --> D{任务类型}
D --> E[文件操作]
D --> F[文档处理]
D --> G[浏览器自动化]
D --> H[外部工具集成]
E --> I[用户确认结果]
F --> I
G --> I
H --> I
桌面 AI 助手和聊天机器人的区别
| 对比项 | 聊天机器人 | Accomplish 这类桌面助手 |
|---|---|---|
| 主要交互 | 问答 | 执行本地任务 |
| 数据位置 | 常见于云端对话 | 更强调本地控制 |
| 能力边界 | 生成文本、解释内容 | 操作文件、文档、浏览器 |
| 重复任务 | 每次重新描述 | 可保存为 Skill |
| 风险点 | 回答不准确 | 可能误操作本地资源 |
桌面助手的优势在于能接触真实工作流,但风险也更具体。它可能移动文件、改写文档、填写网页表单,所以权限设计和操作确认非常重要。
使用时要特别注意的边界
| 风险 | 建议 |
|---|---|
| 文件误删或误移动 | 对重要目录开启确认,不要直接批量执行 |
| 文档被错误改写 | 保留版本历史或先生成副本 |
| 浏览器表单误提交 | 表单提交前必须人工确认 |
| 敏感文件被读取 | 限制可访问目录 |
| Skill 行为不稳定 | 用小样本测试,再扩大范围 |
开源地址:
https://github.com/accomplish-ai/accomplish
如果只是想试用,建议从一个临时目录开始,例如放入几十个测试文件,让它按文件名和内容分类。确认行为符合预期后,再考虑接入真实工作目录。
4 个项目怎么选
这几个项目代表了不同层面的 AI 工程实践,选择时可以按任务类型来判断。
| 你的需求 | 更适合的项目 | 关键判断点 |
|---|---|---|
| 把图片里的流程图改成可编辑文件 | Edit Banana | 输入图是否清晰、结构是否规整 |
| 研究机器人如何根据视觉和语言执行动作 | Xiaomi-Robotics-0 | 是否有仿真或机器人实验环境 |
| 学习代码 Agent 的工程架构 | MyCodeAgent | 是否关注工具调用、上下文和协议设计 |
| 让 AI 自动整理本地文件和桌面任务 | Accomplish | 是否能接受本地权限管理和人工确认流程 |
从学习路径看,MyCodeAgent 更适合理解 Agent 的底层工程结构;Edit Banana 更适合立即解决图表重建问题;Accomplish 更接近日常桌面自动化;Xiaomi-Robotics-0 则偏机器人和具身智能研究,需要更强的硬件、数据和实验环境支撑。
上手前的通用检查清单
无论试哪个项目,都建议先检查这些内容:
- License 是否允许你的使用场景;
- README 是否提供清晰安装步骤;
- 是否需要 GPU、机器人硬件或特定系统权限;
- 是否会读取本地敏感文件;
- 是否支持 dry-run 或人工确认;
- 输出结果是否方便回滚;
- 项目 issue 和 commit 是否活跃。
4 个仓库地址集中列在这里:
Edit Banana:
https://github.com/bit-datalab/edit-banana
Xiaomi-Robotics-0:
https://github.com/XiaomiRobotics/Xiaomi-Robotics-0
MyCodeAgent:
https://github.com/YYHDBL/MyCodeAgent
Accomplish:
https://github.com/accomplish-ai/accomplish
AI 工具真正有价值的地方,不是把模型包装成一个新入口,而是让模型进入具体流程:图表重建要能产出可编辑结构,机器人模型要能生成动作,代码智能体要能安全调用工具,桌面助手要能在权限边界内执行任务。能不能把“不确定的模型能力”变成“可验证、可回滚、可控制的工程流程”,才是判断这类项目是否成熟的关键。