3D 内容生成的难点不只是“把东西做成立体的”。真正难的是生成一个能用的 3D 资产:几何结构要完整,纹理要和参考图一致,材质要能在渲染器或仿真引擎里产生合理的光照效果。
Seed3D 1.0 解决的就是这个问题。它以单张图像作为输入,端到端生成高质量 3D 模型,并尽量让结果达到仿真级使用要求。所谓仿真级,不只是视觉上像,还包括结构完整、表面细节稳定、材质信息可被物理渲染管线使用,生成结果能够进一步导入 Isaac Sim 这类仿真平台,为机器人训练、自动驾驶模拟、虚拟现实内容构建等场景提供资产基础。
可以把它理解成一条从图片到 3D 资产的自动化生产线:
flowchart LR
A[单张参考图像] --> B[几何结构生成]
B --> C[纹理贴图生成]
C --> D[PBR 材质估计]
D --> E[仿真级 3D 资产]
E --> F[渲染器 / 游戏引擎 / Isaac Sim]
3D 生成为什么比 2D 图像生成更难
2D 图像生成只需要输出一个平面结果,模型只要在像素空间里保持视觉合理即可。3D 生成面对的是三维空间,至少要同时满足三类约束:
| 约束 | 要解决的问题 | 失败表现 |
|---|---|---|
| 几何结构 | 物体形状、拓扑、厚度、连接关系是否合理 | 缺面、穿模、结构断裂、比例错误 |
| 多视角一致性 | 从不同角度看是否仍然像同一个物体 | 正面正常,侧面变形,背面内容混乱 |
| 材质可渲染性 | 金属、塑料、玻璃、粗糙度等属性是否合理 | 光照不真实,反射错误,仿真引擎中效果不稳定 |
单图生成 3D 还会遇到一个额外问题:输入图像只提供了一个视角,背面、侧面和遮挡区域都没有直接信息。模型必须根据训练数据学到的先验去补全不可见部分,同时不能让补全部分破坏整体结构。
因此,Seed3D 1.0 的核心不只是一个生成模型,而是数据、模型和资产转换管线一起配合。
数据管线:先解决高质量 3D 数据稀缺
3D 生成模型对训练数据非常敏感。如果训练数据里大量资产存在破面、低质量贴图、材质缺失或尺度混乱,模型会直接学到这些问题。Seed3D 1.0 的基础工作是构建一套三阶段数据处理管线,把来源复杂的 3D 资产整理成可训练的数据。
这张图展示了 Seed3D 1.0 的数据处理思路:
这条管线可以拆成几个关键步骤:
flowchart TD
A[海量异构 3D 原始数据] --> B[清洗与格式统一]
B --> C[自动化质量评估]
C --> D{是否达到训练质量}
D -- 否 --> E[剔除或修复]
D -- 是 --> F[多视角渲染]
F --> G[图像-3D 配对数据集]
G --> H[结构化 3D 资产转换]
H --> I[用于训练的高质量数据]
这里的“异构”很关键。真实世界里的 3D 数据可能来自不同格式、不同建模工具、不同资产库,网格结构、纹理坐标、材质表达方式都不统一。如果不先做标准化处理,模型很难学到稳定规律。
质量评估也不是可选项。3D 资产的问题往往不会在单个角度暴露出来,例如一个模型正面看起来正常,但背面缺失、法线错误或者纹理展开混乱。自动化质量评估可以把这类低质量数据过滤掉,让后续训练集中在结构完整、纹理清楚、材质可用的样本上。
多视角渲染数据集则承担了“从 2D 监督 3D”的作用。模型看到的不只是一个资产本身,还能学习同一个物体在不同相机角度下的外观变化,从而提升生成结果的多视角一致性。
模型架构:用 Diffusion Transformer 生成几何、纹理和材质
Seed3D 1.0 采用基于 Diffusion Transformer 的架构。Diffusion 是扩散模型,擅长从噪声中逐步恢复目标数据;Transformer 擅长建模长距离依赖和全局关系。二者结合后,可以让模型在生成 3D 内容时同时关注局部细节和整体结构。
它要完成三件事:
- 几何生成:生成物体的三维形状,保证主体结构完整。
- 纹理贴图生成:让表面颜色和参考图保持一致,并在多视角下稳定。
- PBR 材质估计:生成适合物理渲染的材质属性。
PBR 是 Physically Based Rendering 的缩写,通常翻译为基于物理的渲染。它会把材质拆成更接近真实渲染过程的属性,例如基础颜色、粗糙度、金属度、法线等。相比只生成一张颜色贴图,PBR 材质更适合进入游戏引擎、影视渲染器和机器人仿真环境。
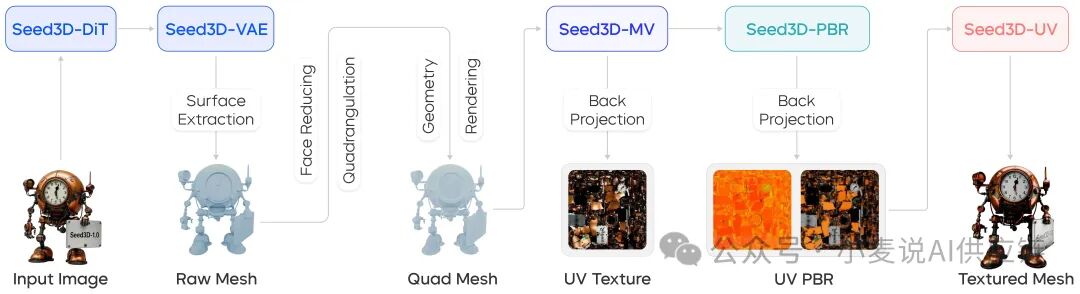
整体生成流程可以这样理解:
flowchart TD
A[输入参考图] --> B[图像特征编码]
B --> C[Diffusion Transformer]
C --> D[几何表示生成]
C --> E[多视角一致纹理生成]
C --> F[PBR 材质估计]
D --> G[网格 / 结构化 3D 表示]
E --> H[纹理贴图]
F --> I[材质参数]
G --> J[完整 3D 资产]
H --> J
I --> J
几何、纹理和材质不能孤立处理。如果几何结构错误,纹理贴得再清晰也无法在三维空间中成立;如果纹理没有视角一致性,模型旋转后就会出现表面内容漂移;如果材质不准确,导入仿真环境后会出现反射、光照、粗糙度不符合预期的问题。
几何生成:小参数模型也能还原复杂结构
几何质量是 3D 生成的底座。Seed3D 1.0 的 1.5B 参数模型在几何评估中超过了一些 3B 参数规模的方案,尤其在齿轮这类复杂结构上表现明显。齿轮的难点在于重复齿形、边缘厚度、中心孔洞和整体圆形结构都要同时正确,任何一处偏差都会让模型看起来不可信。
这张评测图展示了几何结构上的对比:
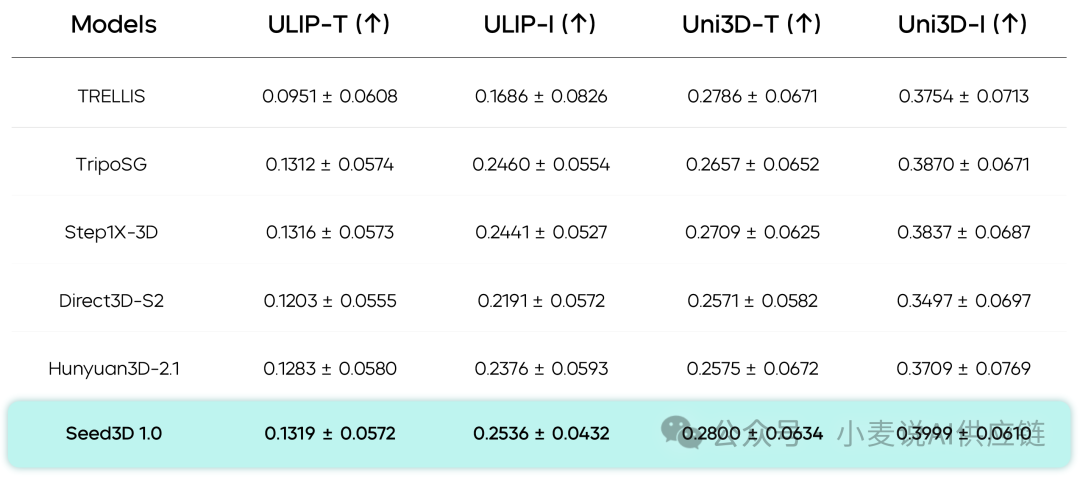
从这类结果可以看到,3D 生成并不是参数越大就一定越好。数据质量、几何表示方式、训练目标和后处理管线都会影响最终结果。对于仿真场景来说,几何结构还有一个额外要求:生成结果不能只是“看起来像”,还要尽量避免破面、悬空、断裂和不可解释的结构噪声,否则导入物理引擎后会影响碰撞、抓取和运动仿真。
纹理与材质:不只要清晰,还要和参考图一致
纹理生成的目标不是随便给模型上色,而是让 3D 资产尽可能继承输入图像中的颜色、图案、文字、局部细节和材质观感。
这张图展示了 Seed3D 1.0 在参考图像保持性上的表现:
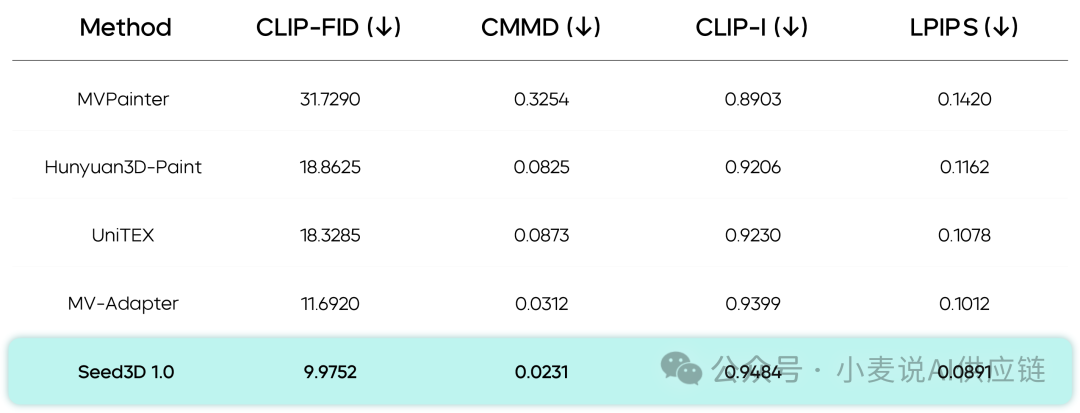
纹理保持性可以从三个层面理解:
| 层面 | 关注点 | 例子 |
|---|---|---|
| 全局外观 | 主色调、整体风格是否一致 | 红色椅子不能变成蓝色椅子 |
| 局部细节 | 图案、文字、装饰是否保留 | 包装盒文字、玩具脸部表情 |
| 多视角稳定 | 旋转后纹理是否连续 | 正面图案不能在侧面突然断裂 |
另一个重点是材质。材质决定物体在不同光照下如何反应,尤其会影响金属、塑料、皮革、玻璃、陶瓷等表面效果。只靠颜色贴图无法表达这些属性,因此 Seed3D 1.0 引入 PBR 材质估计框架,让生成结果更适合后续渲染和仿真。
这张图展示了材质纹理相关的综合效果:
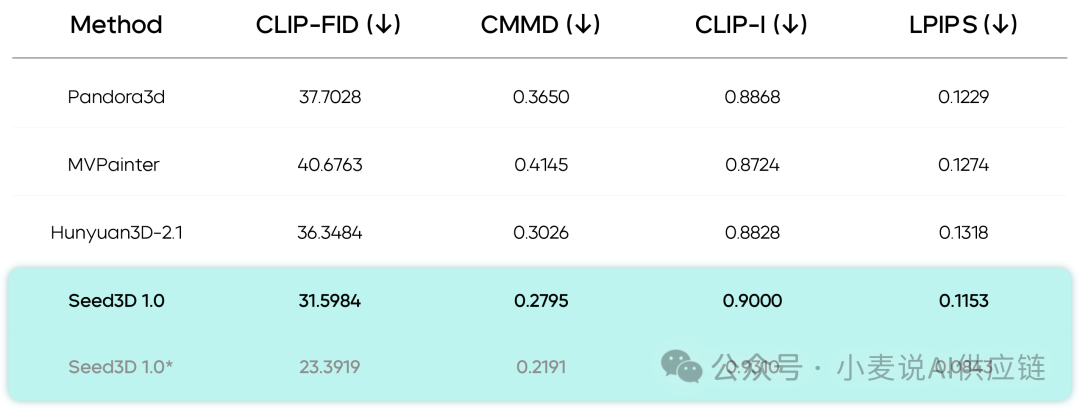
对于具身智能训练来说,材质并不是纯视觉问题。机器人需要在仿真环境中观察、接近、抓取、移动物体,材质会影响视觉识别、深度感知和光照鲁棒性。越接近真实渲染规律的材质,越有利于缩小模拟环境和真实世界之间的差距。
从单物体到复杂场景
单物体生成解决的是资产生产问题,复杂场景生成解决的是环境构建问题。Seed3D 1.0 支持通过分步生成策略构建完整 3D 场景:先生成场景中的对象,再组织对象之间的位置、尺度和关系,最后把结果放入仿真或渲染环境。
这张图展示了从单个对象扩展到场景构建的能力:

分步生成的好处是可控性更强。复杂场景如果一次性生成,很容易出现对象重叠、尺度不一致、布局混乱等问题;拆成多个步骤后,每个对象可以分别生成,再通过场景布局约束组合起来。
一个典型流程如下:
flowchart TD
A[场景需求或参考图] --> B[拆解出物体列表]
B --> C[逐个生成 3D 物体]
C --> D[估计尺度与空间位置]
D --> E[组合成完整场景]
E --> F[导入仿真引擎]
F --> G[用于智能体训练或评测]
这种能力对视觉-语言-行动模型很重要。视觉-语言-行动模型通常需要同时理解图像、语言指令和动作执行,例如“拿起桌子左侧的红色杯子并放到托盘里”。要训练和评估这类模型,就需要大量结构清晰、物体丰富、交互关系合理的三维环境。手工搭建这些环境成本很高,自动生成 3D 场景可以显著降低资产生产门槛。
为什么它和具身智能有关
具身智能强调智能体在物理环境中的感知、决策和行动。机器人不能只会看图和回答问题,还要能在真实或模拟环境中完成动作,比如抓取、导航、避障、放置和装配。
现实世界训练有三个限制:
| 限制 | 具体问题 |
|---|---|
| 成本高 | 真实机器人训练需要设备、场地和维护 |
| 风险高 | 反复试错可能损坏物体、设备或环境 |
| 数据慢 | 构造足够多样的真实场景非常耗时 |
仿真环境可以让机器人先在虚拟世界里大量试错,再把学到的策略迁移到真实世界。问题在于,仿真环境也需要大量 3D 资产和场景。如果每个物体、房间、工具、家具都靠人工建模,规模很难上去。
Seed3D 1.0 的价值就在这里:它可以把一张图片变成可用的 3D 资产,再导入 Isaac Sim 等仿真引擎。经过必要适配后,这些资产可以参与机器人训练和评估。
sequenceDiagram
participant U as 用户/数据系统
participant S as Seed3D 1.0
participant A as 3D资产库
participant I as Isaac Sim 仿真环境
participant R as 具身智能模型
U->>S: 输入单张参考图
S->>S: 生成几何、纹理、PBR材质
S-->>A: 输出结构化3D资产
A->>I: 导入仿真场景
I->>R: 提供观察、交互和奖励信号
R->>I: 执行动作并反复试错
这套流程可以服务两个目标:
-
提升物理交互能力
智能体可以在丰富的虚拟场景中学习抓取、移动、避障、开关门、使用工具等任务。 -
扩大训练内容多样性
不同形状、材质、布局和光照条件的环境可以更快生成,有利于提高模型泛化能力。
适合哪些场景,不适合哪些场景
Seed3D 1.0 更适合需要快速生成大量 3D 资产的场景,而不是完全替代专业建模师在高精度工业设计中的工作。
| 场景 | 适合程度 | 原因 |
|---|---|---|
| 机器人仿真训练 | 高 | 需要大量物体和场景,资产多样性比单个模型极致精修更重要 |
| 游戏和虚拟现实原型 | 高 | 可以快速从概念图生成可预览资产 |
| 电商 3D 展示 | 中高 | 单图转 3D 能降低展示资产制作成本,但商品细节需要校验 |
| 自动驾驶模拟 | 中 | 可用于部分场景资产生成,但道路规则、动态对象和传感器仿真还需要额外系统 |
| 工业 CAD 精密建模 | 低到中 | 对尺寸、公差、拓扑可编辑性要求高,生成模型通常还需要人工重建 |
| 医疗、工程安全关键仿真 | 低 | 对结构真实性和物理参数准确性要求极高,不能只依赖生成结果 |
还需要解决的问题
单图生成 3D 资产已经降低了内容生产门槛,但要支撑真正的大规模世界模拟器,还需要继续解决几个问题。
1. 生成精度
复杂机械结构、透明材质、细长部件、多层嵌套结构仍然很难。单张图像提供的信息有限,模型必须猜测不可见区域,猜测就可能出错。未来需要更强的几何约束、更好的多视角推理能力,以及更稳定的结构表示。
2. 泛化能力
训练数据覆盖不到的物体类别、特殊材质或罕见结构,生成质量可能下降。泛化能力不仅取决于模型规模,也取决于训练数据的类别覆盖、质量分布和标注方式。
3. 鲁棒性
同一个物体在不同光照、背景、遮挡和拍摄角度下,生成结果应该保持稳定。对于生产系统来说,鲁棒性比单次样例效果更重要,因为实际输入往往不干净。
4. 和多模态大语言模型结合
多模态大语言模型可以理解图像、文字和空间语义。如果把它引入 3D 生成流程,可以让系统更好地理解“这是什么物体”“哪些部分重要”“材质应该如何补全”“场景中对象关系是什么”。这有助于提高生成质量,也能增强通过自然语言控制 3D 生成的能力。
一个可能的增强流程是:
flowchart LR
A[图像输入] --> C[多模态大语言模型]
B[文本约束] --> C
C --> D[物体语义与结构提示]
D --> E[Seed3D 生成模型]
E --> F[几何 + 纹理 + PBR材质]
F --> G[可编辑 / 可仿真的 3D资产]
上手入口
Seed3D 1.0 已提供项目主页、论文和体验入口:
- 项目主页:https://seed.bytedance.com/seed3d
- 论文链接:https://lf3-static.bytednsdoc.com/obj/eden-cn/lapzild-tss/ljhwZthlaukjlkulzlp/seed3d.pdf
- 体验入口:https://console.volcengine.com/ark/region:ark+cn-beijing/experience/vision?modelId=doubao-seed3d-1-0-250928&tab=Gen3D
Seed3D 1.0 的关键意义不在于把 2D 图片“变立体”这么简单,而是把单图输入、几何生成、纹理保持、PBR 材质估计和仿真引擎接入串成了一条完整链路。对数字内容生产来说,它降低了 3D 资产制作门槛;对具身智能来说,它提供了一种快速构建训练环境和评估场景的新方式。